

View on GitHub
Open this notebook in GitHub to run it yourself
Quantum-Based Resiliency Planning
This notebook implements the quantum-based resiliency planning using QAOA.Copy
Ask AI
import math
import random
from itertools import product
from platform import node
import matplotlib.pyplot as plt
import networkx as nx
import numpy as np
import pandas as pd
from scipy.optimize import minimize
from tqdm import tqdm
from classiq import *
from classiq.execution import ExecutionPreferences, ExecutionSession
# Imports
Create the graph
Copy
Ask AI
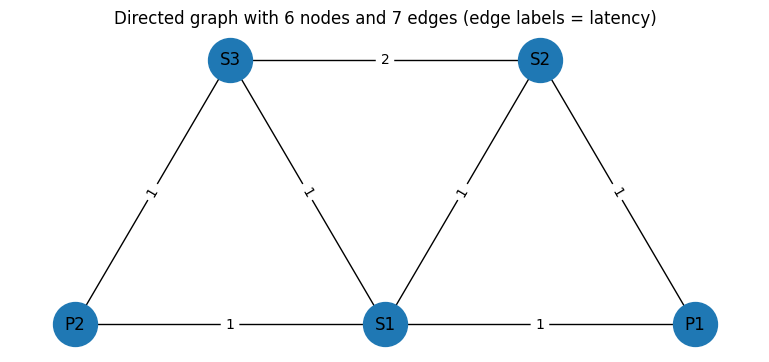
# ---
- Graph ----
graph = nx.Graph()
V = ["P1", "P2", "S1", "S2", "S3"]
graph.add_nodes_from(V)
E_with_weights = [
("P1", "S1", {"lat": 1, "perr": 0.1}),
("P1", "S2", {"lat": 1, "perr": 0.1}),
("S2", "S1", {"lat": 1, "perr": 0.1}),
("P2", "S1", {"lat": 1, "perr": 0.1}),
("S3", "S1", {"lat": 1, "perr": 0.1}),
("P2", "S3", {"lat": 1, "perr": 0.1}),
("S3", "S2", {"lat": 2, "perr": 0.1}),
]
lat_vec = np.array([w["lat"] for (_, _, w) in E_with_weights], dtype=float)
perr_vec = np.array([w["perr"] for (_, _, w) in E_with_weights], dtype=float)
graph.add_edges_from(E_with_weights)
E = graph.edges()
lat = {(u, v): w["lat"] for (u, v, w) in E_with_weights}
perr = {(u, v): w["perr"] for (u, v, w) in E_with_weights}
ordered_edges = [(u, v) for (u, v, _) in E_with_weights]
edge_ids = [f"({u},{v})" for (u, v) in ordered_edges]
ids = edge_ids + V
def weight_of_e(u, v, weights):
if (u, v) in lat.keys():
return weights[(u, v)]
return weights[(v, u)]
def lat_of_e(u, v):
return weight_of_e(u, v, lat)
def perr_of_e(u, v):
return weight_of_e(u, v, perr)
# ---
- Demands ----
# From S2
source_node = "S2"
demands = [
{"name": "d1", "s": source_node, "t": "P1"},
{"name": "d2", "s": source_node, "t": "P2"},
]
D = len(demands)
m = len(E)
n = len(V)
# ---
- Z 2D matrix ----
row_len = m + n
Z = np.zeros((D, (m + n)), dtype=int)
# Creating the solution we aim to get
Z[0, 1] = Z[0, 7] = Z[0, 10] = 1
Z[1, 5] = Z[1, 6] = Z[1, 11] = Z[1, 10] = Z[1, 8] = 1
Z_df = pd.DataFrame(
Z, index=[f"{d['name']}({d['s']}→{d['t']})" for d in demands], columns=ids
)
# ---
- Plot ----
pos = {
"P1": (2.0, 1.0),
"P2": (1.0, 1.0),
"S1": (1.5, 1.0),
"S2": (1.75, 2.0),
"S3": (1.25, 2.0),
}
plt.figure(figsize=(7.5, 3.2))
nx.draw(graph, pos, with_labels=True, node_size=1000)
nx.draw_networkx_edge_labels(
graph, pos, edge_labels={(u, v): f"{lat_of_e(u,v)}" for (u, v) in E}
)
plt.title("Directed graph with 6 nodes and 7 edges (edge labels = latency)")
plt.tight_layout()
plt.show()
print("\nDemands (2 total):")
print(
pd.DataFrame(
[{"Demand": d["name"], "Source": d["s"], "Target": d["t"]} for d in demands]
)
)
print("\nZ (D x (m+n)) binary matrix — rows=demand, cols=edge (initialized to 0):")
print(Z_df)
Output:
Copy
Ask AI
/var/folders/r8/5nlfyms56kj96_c21bgv36040000gn/T/ipykernel_86414/3897101284.py:81: UserWarning: This figure includes Axes that are not compatible with tight_layout, so results might be incorrect.
plt.tight_layout()
Output:
Copy
Ask AI
Demands (2 total):
Demand Source Target
0 d1 S2 P1
1 d2 S2 P2
Z (D x (m+n)) binary matrix — rows=demand, cols=edge (initialized to 0):
(P1,S1) (P1,S2) (S2,S1) (P2,S1) (S3,S1) (P2,S3) (S3,S2) P1 \
d1(S2→P1) 0 1 0 0 0 0 0 1
d2(S2→P2) 0 0 0 0 0 1 1 0
P2 S1 S2 S3
d1(S2→P1) 0 0 1 0
d2(S2→P2) 1 0 1 1
Copy
Ask AI
num_edges = len(ordered_edges)
err_correlation = np.full((num_edges, num_edges), 0)
correlated = True
i = j = 0
for index, (u1, v1) in enumerate(ordered_edges):
if (u1, v1) in [("P1", "S2"), ("S2", "P1")]:
i = index
if (u1, v1) in [("S1", "S2"), ("S2", "S1")]:
j = index
assert i != j != 0
if correlated:
err_correlation[i, j] = err_correlation[j, i] = 1
err_correlation
Output:
Copy
Ask AI
array([[0, 0, 0, 0, 0, 0, 0],
[0, 0, 1, 0, 0, 0, 0],
[0, 1, 0, 0, 0, 0, 0],
[0, 0, 0, 0, 0, 0, 0],
[0, 0, 0, 0, 0, 0, 0],
[0, 0, 0, 0, 0, 0, 0],
[0, 0, 0, 0, 0, 0, 0]])
Copy
Ask AI
import matplotlib.pyplot as plt
def get_edge(u, v, arr):
if (u, v) in arr:
return (u, v)
return (v, u)
def print_solution_graph(assigned_z, index=None):
# Assign a distinct color per demand
colors_for_demands = ["red", "blue", "green", "yellow"]
edge_colors = []
edge_widths = []
node_colors = []
# Build a mapping from edge -> demand index (if chosen)
edge_to_demand = {}
for d_idx, d in enumerate(demands):
for e_idx, (u, v) in enumerate(ordered_edges):
if assigned_z[d_idx, e_idx] == 1:
edge_to_demand[(u, v)] = d_idx
# Create color list for all edges in E
for u, v in E:
if (u, v) in edge_to_demand or (v, u) in edge_to_demand:
demand_idx = edge_to_demand[get_edge(u, v, edge_to_demand)]
edge_colors.append(colors_for_demands[demand_idx])
edge_widths.append(3.0)
else:
edge_colors.append("lightgray")
edge_widths.append(1.0)
# Plot the graph
plt.figure(figsize=(8, 3.6))
nx.draw(
graph,
pos,
with_labels=True,
node_size=1000,
edge_color=edge_colors,
width=edge_widths,
)
nx.draw_networkx_edge_labels(
graph, pos, edge_labels={(u, v): f"{lat_of_e(u,v)}" for (u, v) in ordered_edges}
)
if index is not None:
plt.title(
f"Routing solution for sample index {index} — edges colored by demand"
)
else:
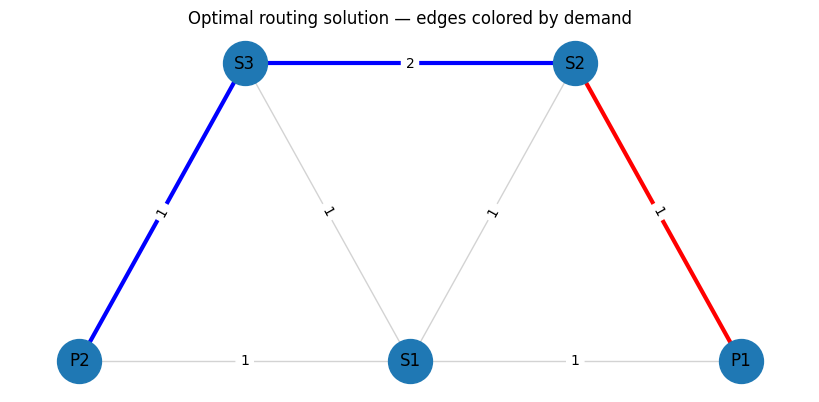
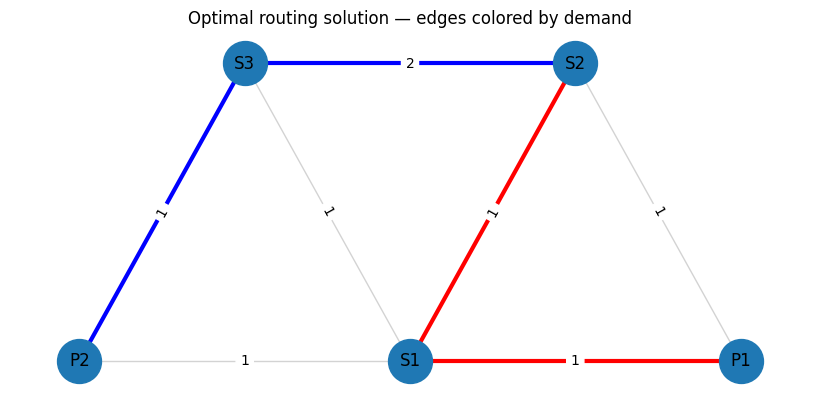
plt.title("Optimal routing solution — edges colored by demand")
plt.show()
print(Z_df)
print_solution_graph(Z)
Output:
Copy
Ask AI
(P1,S1) (P1,S2) (S2,S1) (P2,S1) (S3,S1) (P2,S3) (S3,S2) P1 \
d1(S2→P1) 0 1 0 0 0 0 0 1
d2(S2→P2) 0 0 0 0 0 1 1 0
P2 S1 S2 S3
d1(S2→P1) 0 0 1 0
d2(S2→P2) 1 0 1 1
Copy
Ask AI
# The mixer Hamiltonian is effectively X/2 and has eigenvalues -0.5 and +
0.
5. So the difference between minimum and maximum eigenvalues is exactly
1.
# This can be rescaled by a global scaling parameter.
GlobalScalingParameter = 1
# The constraint Hamiltonian has the property that a minimal constraint violation is 1 and no constraint violation is
0.
# We wish to normalise the constraint Hamiltonian relative to the total cost Hamiltonian such that the constraint violation will be 1~2 x larger than the maximal difference between total cost values.
RelativeConstraintNormalisation = 5
# The cost Hamiltonian should be similar in eigenvalue difference to the mixer Hamiltonian and should be normalised to about
1.
# To find the exact normalisation requires solving this NP hard problem so we always use approximation.
# Since this is approximate, there is a relative scaling parameter we can twitch
RelativeCostNormalisation = 1 / 40
TotalCostNormalisation = GlobalScalingParameter * RelativeCostNormalisation
TotalConstraintNormalisation = RelativeConstraintNormalisation * TotalCostNormalisation
# B stands for the relationship between error correlation and latency
B = 10
# Normalize latencies
min_lat_guess = (
3 # can be calculated with Dijkstra when removing the single assignment constraint
)
max_lat_guess = 4 # any guess that fits the constraints will work
lat_normalized = {}
for e, w in lat.items():
lat_normalized[e] = w * TotalCostNormalisation / (max_lat_guess - min_lat_guess)
min_prob_guess = 0.03
max_prob_guess = 1.0
print(lat_normalized)
Output:
Copy
Ask AI
{('P1', 'S1'): 0.025, ('P1', 'S2'): 0.025, ('S2', 'S1'): 0.025, ('P2', 'S1'): 0.025, ('S3', 'S1'): 0.025, ('P2', 'S3'): 0.025, ('S3', 'S2'): 0.05}
Helper Functions
Copy
Ask AI
def edge_fidx(d_idx, e_idx):
return d_idx * row_len + e_idx
def node_fidx(d_idx, n_idx):
return d_idx * row_len + n_idx + m
Define Objective Function
Copy
Ask AI
def sum_per_array(assigned_z, array):
return sum(
(array[e] * assigned_z[edge_fidx(d_idx, e_idx)])
for d_idx, d in enumerate(demands)
for e_idx, e in enumerate(ordered_edges)
)
# Objective: sum_d sum_e lat_e * Z[d,e]
def objective_func(assigned_z):
lat_sum = sum_per_array(assigned_z, lat_normalized)
return lat_sum
Define Single Assignment Cosntraint
Copy
Ask AI
def edges_per_node(node):
for edge_idx, edge in enumerate(ordered_edges):
if node in edge:
yield edge_idx
def flow_conservation_per_node_per_demand(
node, node_idx, demand_idx, demand, assigned_z
):
node_flow = 0
# If node is the start/end of this demand, add 1 imaginary edge
if node in demand.values():
node_flow += 1
# If the node is in the path, subtract 2 required edges
node_flow -= 2 * assigned_z[node_fidx(d_idx=demand_idx, n_idx=node_idx)]
# Add 1 edge for each used edge for this node
for edge_idx in edges_per_node(node):
node_flow += assigned_z[edge_fidx(d_idx=demand_idx, e_idx=edge_idx)]
# Valid solution should have node_flow == 0 since:
# * For nodes not in the path - no edges should be chosen
# * For nodes in the path, there should be exactly 2 edges, or 1 edge for start/end ( + imaginary edge)
return node_flow**2
def my_not(value):
# Assumes value is 0 or 1
return 1 - value
def constraint_starting_nodes(assigned_z):
return sum(
my_not(assigned_z[node_fidx(d_idx=demand_idx, n_idx=V.index(v_of_demand))])
for demand_idx, demand in enumerate(demands)
for v_of_demand in list(demand.values())[1:]
)
def constraint_flow_conservation(assigned_z):
total_flow = sum(
flow_conservation_per_node_per_demand(
node=node,
node_idx=node_idx,
demand=demand,
demand_idx=demand_idx,
assigned_z=assigned_z,
)
for node_idx, node in enumerate(V)
for demand_idx, demand in enumerate(demands)
)
return total_flow + constraint_starting_nodes(assigned_z)
Copy
Ask AI
def sum_correlation(assigned_z):
return sum(
err_correlation[e1_idx, e2_idx]
* assigned_z[edge_fidx(0, e1_idx)]
* assigned_z[edge_fidx(1, e2_idx)]
for e1_idx in range(len(ordered_edges))
for e2_idx in range(len(ordered_edges))
if err_correlation[e1_idx, e2_idx] > 0
)
def node_resiliency(assigned_z):
return sum(
B
* TotalCostNormalisation
* assigned_z[node_fidx(d_idx=0, n_idx=node_idx)]
* assigned_z[node_fidx(d_idx=1, n_idx=node_idx)]
for node_idx in range(len(V))
if V[node_idx] is not source_node
)
def objective_minimal_resiliency(assigned_z):
return sum_correlation(assigned_z)
Copy
Ask AI
def cost_hamiltonian(assigned_Z):
return (
objective_func(assigned_Z)
+ node_resiliency(assigned_Z)
+ objective_minimal_resiliency(assigned_Z)
+ TotalConstraintNormalisation * (constraint_flow_conservation(assigned_Z))
)
Create QAOA Code
Copy
Ask AI
NUM_LAYERS = 20
@qfunc
def mixer_layer(beta: CReal, qba: QArray[QBit]):
apply_to_all(lambda q: RX(GlobalScalingParameter * beta, q), qba)
@qfunc
def cost_layer(gamma: CReal, qba: QArray[QBit]):
phase(phase_expr=cost_hamiltonian(qba), theta=gamma)
@qfunc
def main(
params: CArray[CReal, 2 * NUM_LAYERS],
z: Output[QArray[QBit, D * row_len]],
) -> None:
allocate(z)
hadamard_transform(z)
repeat(
count=NUM_LAYERS,
iteration=lambda i: (
cost_layer(params[2 * i], z),
mixer_layer(params[2 * i + 1], z),
),
)
Copy
Ask AI
qprog = synthesize(main)
Copy
Ask AI
show(qprog)
Output:
Copy
Ask AI
Quantum program link: https://platform.classiq.io/circuit/36se9nqbGvihLDB2r99kNvBvajj
Copy
Ask AI
print(f"Width is {qprog.data.width}")
print(f"Depth is {qprog.transpiled_circuit.depth}")
print(f"Number of gates is {qprog.transpiled_circuit.count_ops}")
Output:
Copy
Ask AI
Width is 24
Depth is 586
Number of gates is {'cx': 2480, 'rz': 1720, 'rx': 480, 'h': 24}
Execute QAOA
Copy
Ask AI
NUM_SHOTS = 20000
backend_preferences = ClassiqBackendPreferences(
backend_name=ClassiqSimulatorBackendNames.SIMULATOR
)
es = ExecutionSession(
qprog,
execution_preferences=ExecutionPreferences(
num_shots=NUM_SHOTS,
),
)
def initial_qaoa_params(NUM_LAYERS) -> np.ndarray:
initial_gammas = math.pi * np.linspace(
1 / (2 * NUM_LAYERS), 1 - 1 / (2 * NUM_LAYERS), NUM_LAYERS
)
initial_betas = math.pi * np.linspace(
1 - 1 / (2 * NUM_LAYERS), 1 / (2 * NUM_LAYERS), NUM_LAYERS
)
initial_params = []
for i in range(NUM_LAYERS):
initial_params.append(initial_gammas[i])
initial_params.append(initial_betas[i])
return np.array(initial_params)
initial_params = initial_qaoa_params(NUM_LAYERS)
Copy
Ask AI
cost_func = lambda state: cost_hamiltonian(state["z"])
def estimate_cost_func(params):
objective_val = es.estimate_cost(cost_func, {"params": params.tolist()})
print(f"Cost Hamiltonian = {np.round(objective_val, decimals=3)}")
return objective_val
Copy
Ask AI
MAX_ITERATIONS = 1 # Increase to improve the results
optimization_res = minimize(
estimate_cost_func,
x0=initial_params,
method="COBYLA",
options={"maxiter": MAX_ITERATIONS},
)
Output:
Copy
Ask AI
Cost Hamiltonian = 1.387
Copy
Ask AI
res = es.sample({"params": optimization_res.x.tolist()})
Copy
Ask AI
def check_validity(assigned_z: list[int]) -> bool:
if constraint_flow_conservation(assigned_z) != 0:
return False
if node_resiliency(assigned_z) != 0:
return False
return True
Copy
Ask AI
sorted_counts = sorted(res.parsed_counts, key=lambda pc: pc.shots, reverse=True)
def print_res(sampled, idx):
assigned_z = sampled.state["z"]
if not check_validity(assigned_z):
return
valid_solutions_indices.append(idx)
print(
f"Valid solution found at index {idx}, probability={sampled.shots/NUM_SHOTS*100}%, cost={cost_hamiltonian(assigned_z)}, latency={round(objective_func(assigned_z) / TotalCostNormalisation * (max_lat_guess - min_lat_guess))}"
)
valid_solutions_indices = []
for idx, sampled in enumerate(sorted_counts[:100]):
print_res(sampled, idx)
print(
f"Accumulated valid probability is {sum(sampled.shots for sampled in sorted_counts if check_validity(sampled.state['z']))/NUM_SHOTS*100}%"
)
Output:
Copy
Ask AI
Valid solution found at index 0, probability=0.64%, cost=0.1, latency=4
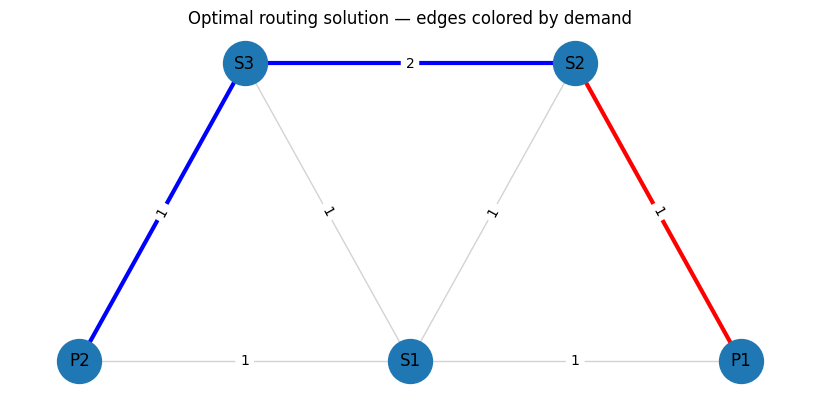
Valid solution found at index 5, probability=0.375%, cost=0.125, latency=5
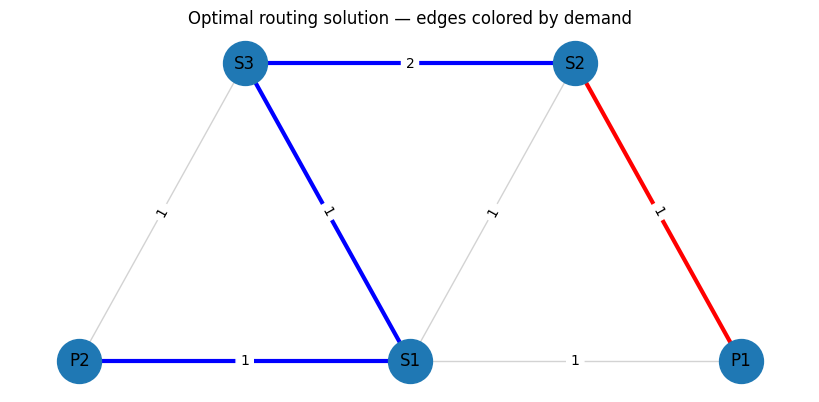
Valid solution found at index 9, probability=0.265%, cost=0.125, latency=5
Valid solution found at index 78, probability=0.075%, cost=1.075, latency=3
Accumulated valid probability is 1.3599999999999999%
Copy
Ask AI
def convert_1d_to_2d(array_1d):
array_2d = np.zeros((D, row_len))
for d_idx in range(D):
for e_idx in range(m):
array_2d[d_idx][e_idx] = array_1d[edge_fidx(d_idx, e_idx)]
for n_idx in range(n):
array_2d[d_idx][m + n_idx] = array_1d[node_fidx(d_idx, n_idx)]
return array_2d
Copy
Ask AI
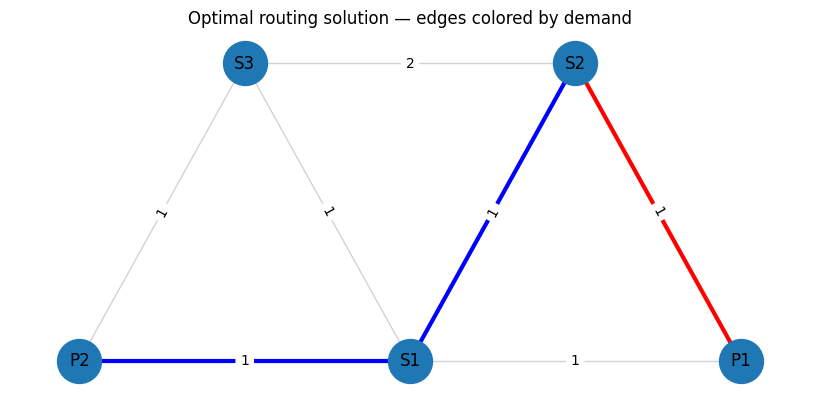
def print_solution(index):
print(index)
solution = sorted_counts[index].state["z"]
sol_2d = convert_1d_to_2d(solution)
print_solution_graph(sol_2d)
sol_df = pd.DataFrame(
sol_2d, index=[f"{d['name']}({d['s']}→{d['t']})" for d in demands], columns=ids
)
print(sol_df)
print(
f"{objective_func(solution)/TotalCostNormalisation * (max_lat_guess-min_lat_guess)=}"
)
print(f"cost={cost_hamiltonian(solution)}")
print(f"Flow Conservation: {constraint_flow_conservation(solution)}")
print(f"Resiliency: {node_resiliency(solution)}")
# for index in valid_solutions_indices:
for index in valid_solutions_indices:
print_solution(index)
Output:
Copy
Ask AI
0
Output:
Copy
Ask AI
(P1,S1) (P1,S2) (S2,S1) (P2,S1) (S3,S1) (P2,S3) (S3,S2) P1 \
d1(S2→P1) 0.0 1.0 0.0 0.0 0.0 0.0 0.0 1.0
d2(S2→P2) 0.0 0.0 0.0 0.0 0.0 1.0 1.0 0.0
P2 S1 S2 S3
d1(S2→P1) 0.0 0.0 1.0 0.0
d2(S2→P2) 1.0 0.0 1.0 1.0
objective_func(solution)/TotalCostNormalisation * (max_lat_guess-min_lat_guess)=4.0
cost=0.1
Flow Conservation: 0
Resiliency: 0.0
5
Output:
Copy
Ask AI
(P1,S1) (P1,S2) (S2,S1) (P2,S1) (S3,S1) (P2,S3) (S3,S2) P1 \
d1(S2→P1) 0.0 1.0 0.0 0.0 0.0 0.0 0.0 1.0
d2(S2→P2) 0.0 0.0 0.0 1.0 1.0 0.0 1.0 0.0
P2 S1 S2 S3
d1(S2→P1) 0.0 0.0 1.0 0.0
d2(S2→P2) 1.0 1.0 1.0 1.0
objective_func(solution)/TotalCostNormalisation * (max_lat_guess-min_lat_guess)=5.0
cost=0.125
Flow Conservation: 0
Resiliency: 0.0
9
Output:
Copy
Ask AI
(P1,S1) (P1,S2) (S2,S1) (P2,S1) (S3,S1) (P2,S3) (S3,S2) P1 \
d1(S2→P1) 1.0 0.0 1.0 0.0 0.0 0.0 0.0 1.0
d2(S2→P2) 0.0 0.0 0.0 0.0 0.0 1.0 1.0 0.0
P2 S1 S2 S3
d1(S2→P1) 0.0 1.0 1.0 0.0
d2(S2→P2) 1.0 0.0 1.0 1.0
objective_func(solution)/TotalCostNormalisation * (max_lat_guess-min_lat_guess)=5.0
cost=0.125
Flow Conservation: 0
Resiliency: 0.0
78
Output:
Copy
Ask AI
(P1,S1) (P1,S2) (S2,S1) (P2,S1) (S3,S1) (P2,S3) (S3,S2) P1 \
d1(S2→P1) 0.0 1.0 0.0 0.0 0.0 0.0 0.0 1.0
d2(S2→P2) 0.0 0.0 1.0 1.0 0.0 0.0 0.0 0.0
P2 S1 S2 S3
d1(S2→P1) 0.0 0.0 1.0 0.0
d2(S2→P2) 1.0 1.0 1.0 0.0
objective_func(solution)/TotalCostNormalisation * (max_lat_guess-min_lat_guess)=3.0000000000000004
cost=1.075
Flow Conservation: 0
Resiliency: 0.0